

|
|
Online seit Februar 2009
|
Bastel-Anleitung
|
|
Download der Bastelanleitung hier als : "Inkrementaler-Drehimpuls-Geber.zip" ca. 2,5Mbyte |
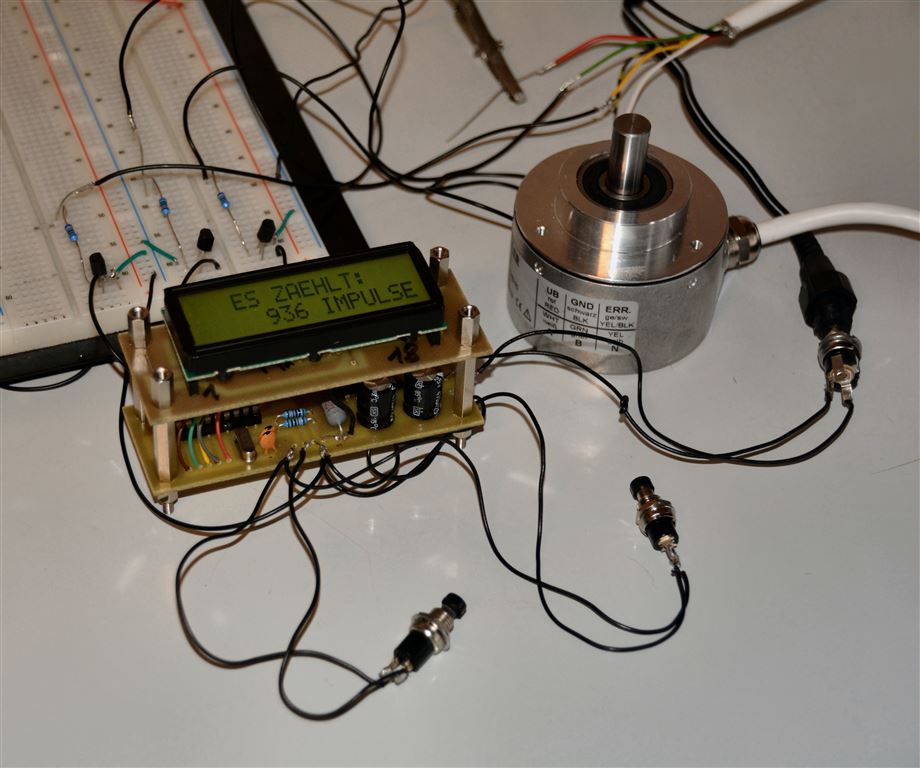
Inkrementale Drehimpuls-Geber finden immer
mehr Anwendung in der Elektronik. Bei einem Radio... usw. werden sie jetzt hauptsächlich nur noch an Stelle der alten Drehko's oder Poti's eingesetzt. Ich habe hier einen Testaufbau vorgenommen um zu PROBIEREN ob es auch die Impulse mit links- und rechts-Drehen der Achse hoch- und runter-zählt. Hier wurden die bestückten Huckepack-Leiterplatten aus "4-Basteleien" (klick hier) verwendet. Es wurde aber ein 20,0Mhz Quarz eingesetzt und 3 Anpass-Treiber-Transistor-Stufen zusätzlich angeschlossen. Durch Drehen des Drehgebers werden die Impulse gezählt, je nach Drehrichtung aufwärts oder abwärts. Drehgeber mit bis zu 9.999 Impulse für 1 Umdrehung sind mit dem Testaufbau einsetzbar und natürlich auch kleinere Impulszahlen mit z.B. 15 Impulsen (siehe unten)! Mess-Geschwindigkeiten mit 1.000 Impulsen / sec sind mit diesem Aufbau machbar / zählbar. |
 |
 |
Test-Ergebnis Mechanischer Schalt-Geber Bestell-Reichelt [klick unterhalb links drauf] : STEC 11B04 (15Imp. / 30Rasterungen) oder STEC 12E07 (24Imp. / 24Rasterungen) funktionierten nicht exakt !!!! Es kippelt beim LANGSAMEN Drehen mit dem auf- und abwärts zählen. Wenn es also um 1 hoch zählt, zählt es auch gleich wieder 1 abwärts. Es kippelt durch die Mechanik der Rasterung. Es kippt ganz kurz vorwärts von der Rasterung weg und dann wieder rückwärts in die Rasterung rein ... Und zählt dabei (beim langsamen drehen!) 1 vor und dann gleich wieder 1 rückwärts ... Es zählt also überhaupt nicht. Aber beim schnellen Durchdrehen der Achse hat alles exakt funktioniert! |
 |
Eine
exakte Positions-Steuerung würde mit diesen billigen mechanischen Schaltdrehgebern nicht funktionieren, da Impulse verloren gehen ! Beim Radio usw... ist dieser Fehler nicht so schlimm... Es ärgert einem trotzdem, wenn man nicht richtig einstellen kann. Bei Optischen teuren Gebern funktionierte es zur vollen Zufriedenheit. Bestell-Conrad [Klick hier] mit 130.-€ Es gibt noch teurere optische Drehgeber. Oder siehe Fotos links beim Testaufbau ! Die Ausgänge A und B kann man vertauschen. Dann ändert sich das Auf- oder Abwärts-Zählen bei gleicher Drehrichtung. (siehe Stromlaufplan unterhalb) Es gibt 2 Software Varianten ! |
|
1. ZUR SOFTWARE MIT
"DREH10-XXXX.ASM" : Man muss (man kann) die PIC-Software ändern für die entsprechende maximale Impulszahl pro Umdrehung. Für nur 32 Impulse / Umdrehung wird die 32 eingetragen. Oder bei 1000 wird die 1000 im ASM-File eingetragen. Dann wird das ASM-Programm assembliert und es entsteht ein HEX-File. Mit diesem HEX-File wird der PIC gebrannt... (Ein Assembler-Programm liegt dazu dem Download mit Erklärung bei.) Man kann hier auch Übersetzungen durch z.B. eine Seilscheibe berücksichtigen. Mit einer Übersetzung von 1:2 bei max. Impulszahl von 32 stellt man eben 64 Impulse im Software-Programm ein. Beim hoch zählen z.B. bei 1000Impulsen : Sind 1000Impulse erreicht, zählt es dann mit 0 aufwärts weiter ! Man kann dies auch an jeder Stelle durch Hand-Reseten mittels Taster bewerkstelligen. Oder Man hat den NULL-Impuls vom Geber angeschlossen und dann stellt es automatisch auf NULL. Aber eben immer an ein und der selben Stelle beim Geber. Beim runter zählen z.B. bei 1000Impulsen : Ist 0 erreicht, geht es mit 999 abwärts-zählend weiter. |
2. ZUR SOFTWARE MIT
"DREH1S-XXXX.ASM" : Hier kann man noch zusätzlich die Geber-Impuls-Stellung mittels Taster abspeichern. Es wird in den EEPROM-Speicher gespeichert und erscheint mit dieser Impulszahl beim erneuten Einschalten. Dann wird hiermit weiter gezählt... (Zum Beispiel: Es merkt sich die Stellung der Antenne...) ----------- Es sollte nur eine kleine Spielerei sein !!! Natürlich lassen sich mit der Schaltung Antennen-Dreh-Richtungs-Positionen anzeigen. Aber ein Aufbau, wie mit einer REGELUNG für die Antennen-Richtungs-Stellung ist für mich zu schwierig. (besonders die Mechanik !!!) (ich muss es ja ausprobieren...) (ich habe keine Anwendung dafür...) Hier gibt es Besseres zu kaufen (mit Antennen-Bremse...) Und Basteln ist auch meist teurer als gekauft... |
| Unterhalb der Stromlaufplan |
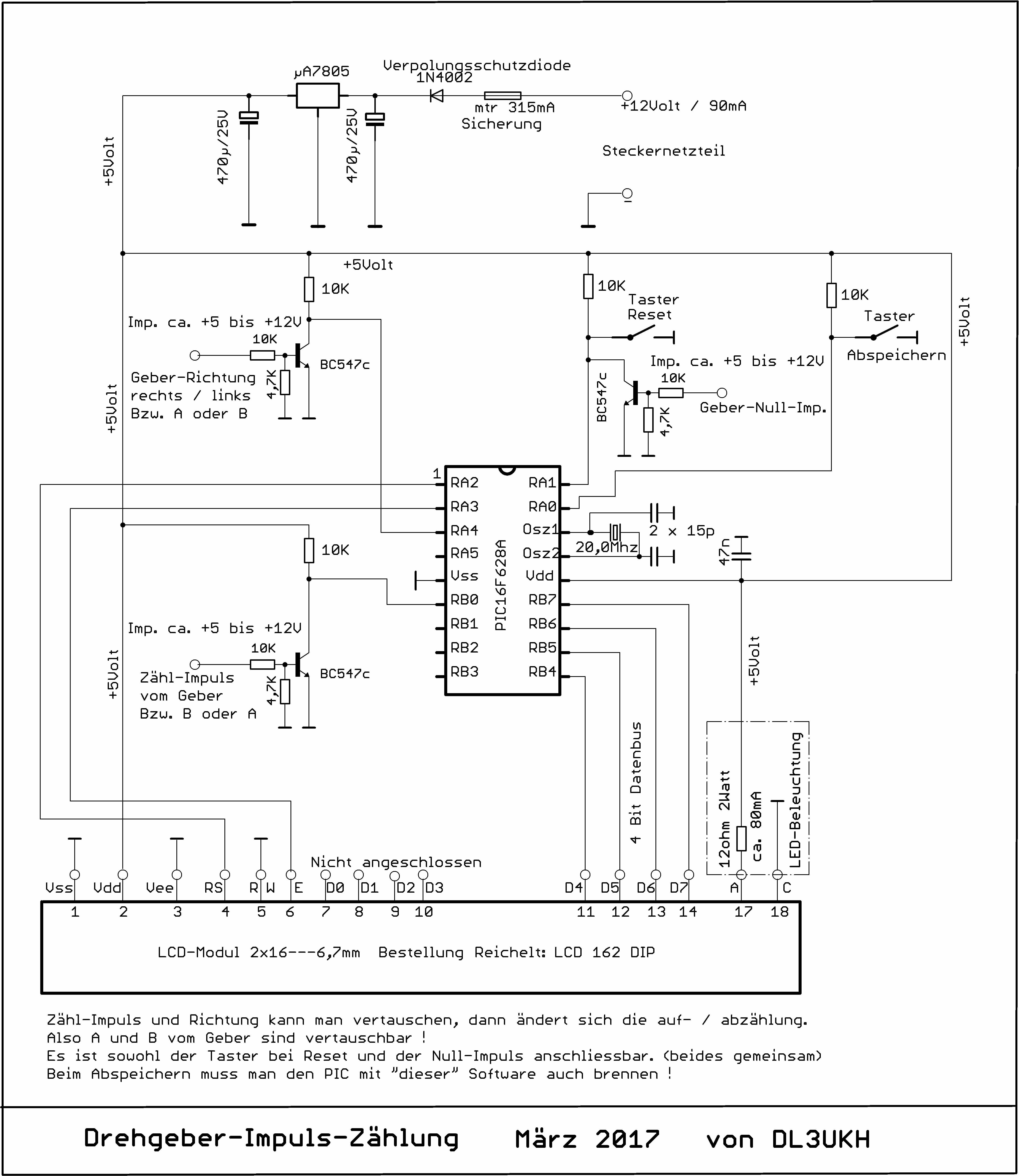 |