|
Online seit Februar 2009
|
Hier
findet man elektronische Modellbau-Bastelanleitungen für :
1.
"2-Kanal-Servo-Schalter"
2.
"Sound-Modul für den obigen Servo-Schalter oder als
Einzel-Leiterplatte"
3.
"Blink-Servo-Einrichtung" für ein
Modell-Auto
4.
"Servo-Flügel-Flatter-Stell-Konverter"
5.
"180-Grad-Servo-Stell-Konverter"
6.
"Fernsteuersender bzw. Empfänger Stell-Impuls-Messung"
(Messung am
Empfänger-Servo-Ausgang)
7.
"Servo-Mess-Stell-Einrichtung" (eine Art Servo-Tester mit
Impuls-Anzeige)
Wenn man
"Hier
drauf klickt"
sieht man etliche
Foto-Shows
vom Modellfliegen
von meinem Bruder und mir als Gehilfen.
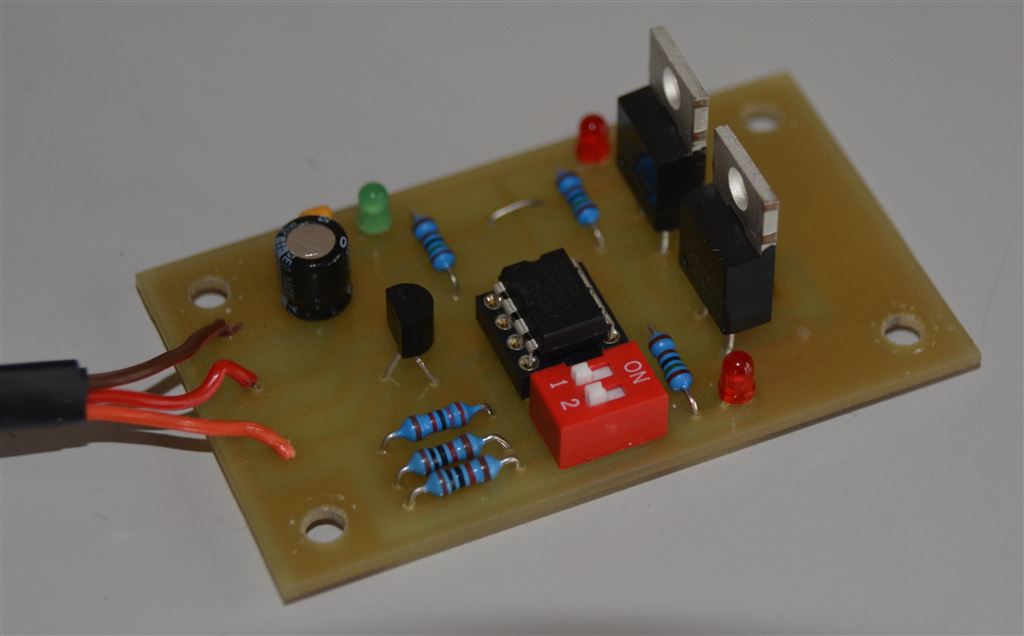
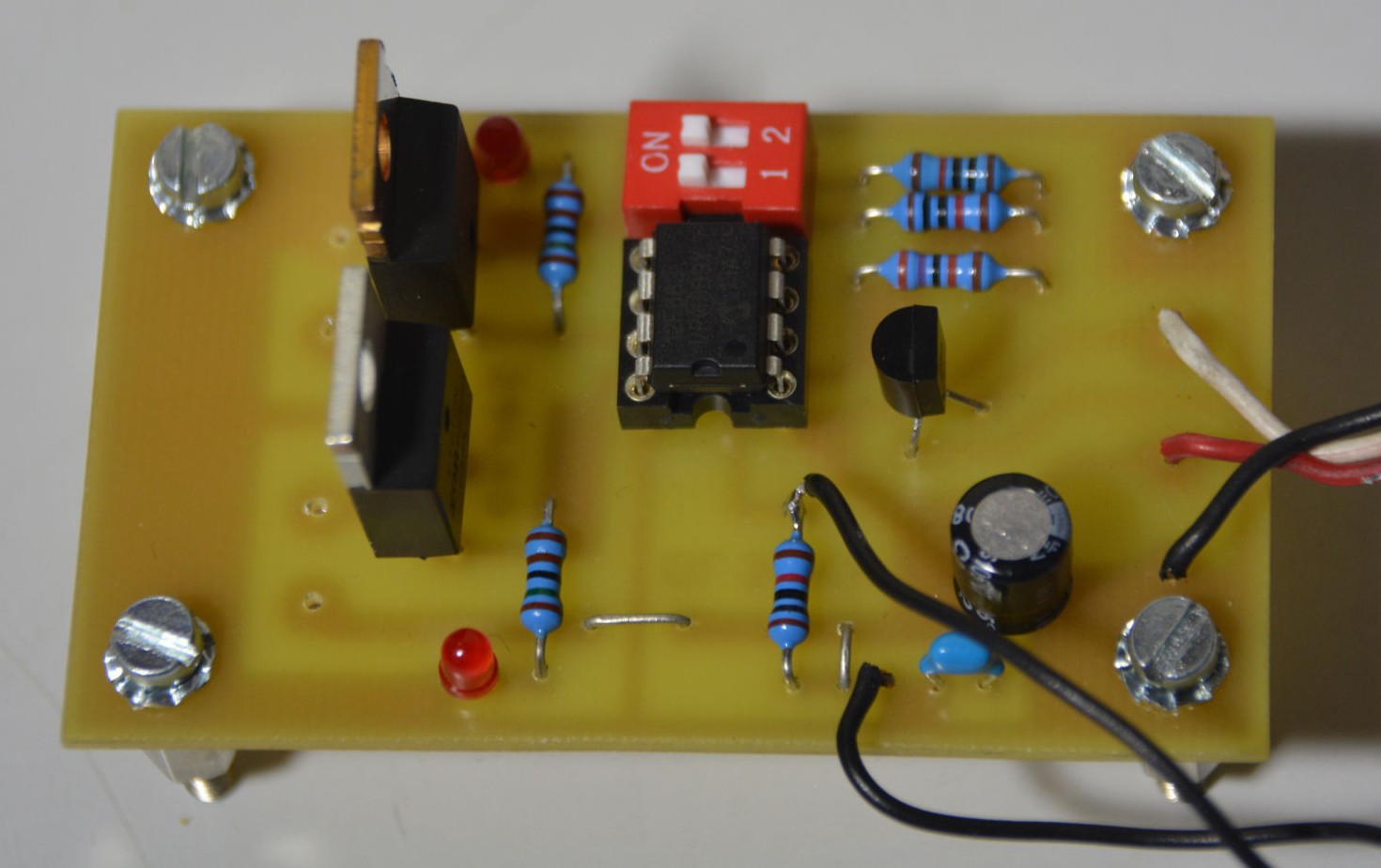
1.
Modellbau-Basteln mit der Bastelanleitung "2-Kanal-Servo-Schalter"
mit dem Controller PIC12F683
|
 |
Download hier als : "Servo-Schalter.zip"
ca.
1,0Mbyte
Kurzbeschreibung:
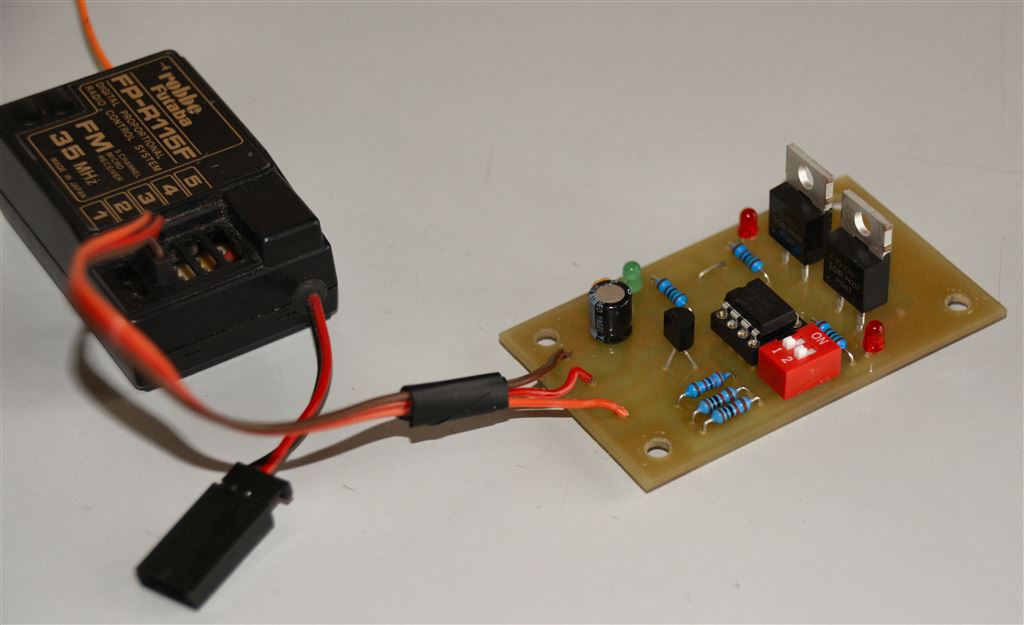
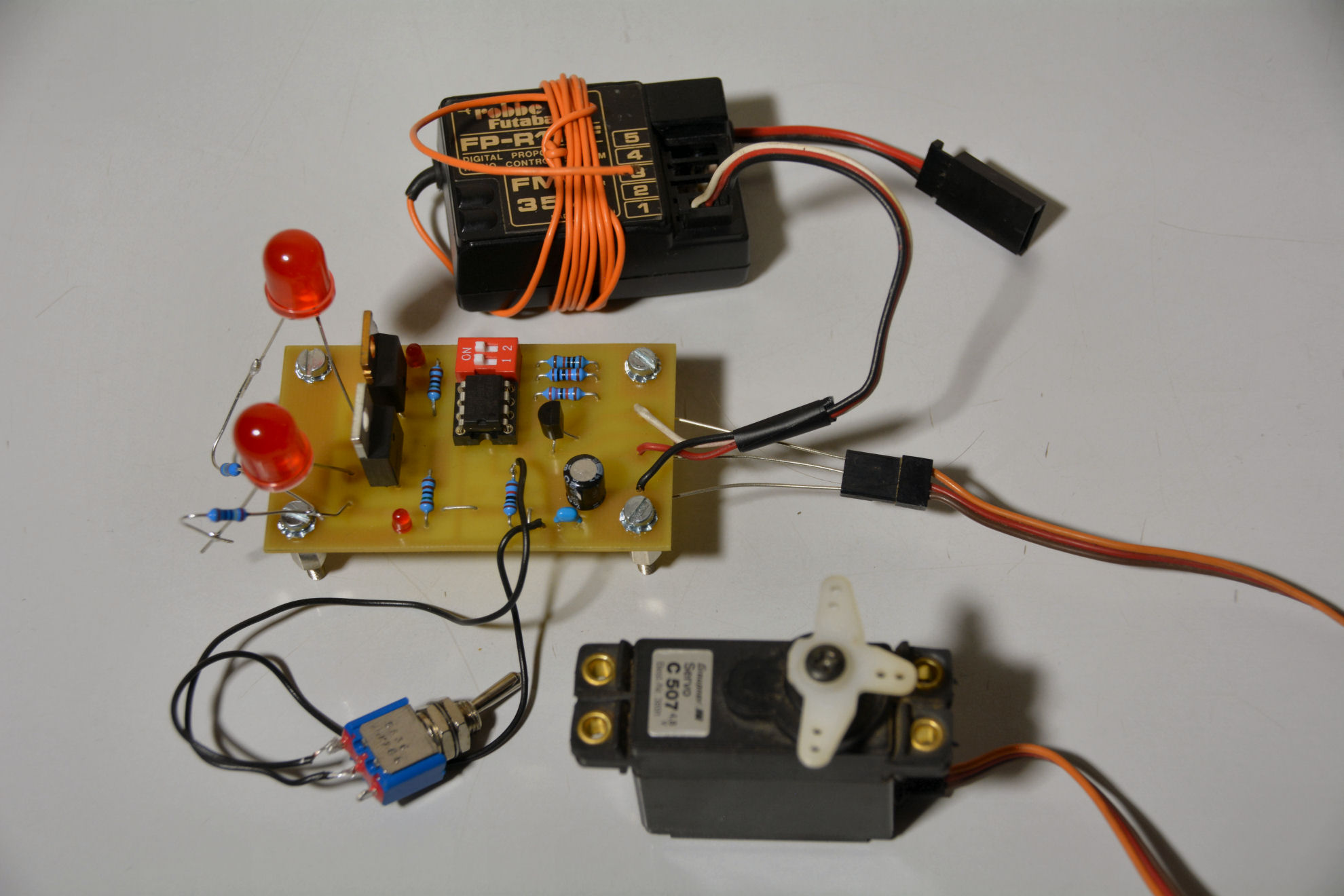
Man schließt diesen Baustein einfach an Stelle
eines
Servos / einer Rudermaschine
am
Fernsteuerempfänger an.
Man könnte ein Relais, einen
Summer oder Beliebiges...
mit EIN und AUS schalten.
Zwei Mosfets
für beide Kanäle
übernehmen dies.
Es geht sowohl mit "interner" 4,8V
Empfängerbatterie als
auch mit einer externen Stromversorgung
z.B. für einen
12Volt Motor.
Zwei rote LEDs zeigen den
Schaltzustand für 2 Kanäle an.
(auch ohne
Verbraucher)
Wenn die grüne Kontroll-LED dauerhaft
leuchtet, ist
das Schalt-Servo Betriebsbereit.
|
 |
Zum Stromlaufplan (Klick
hier)
Zum Bestückungsplan (Klick
hier)
Im Download ist alles besser erkennbar
!
Durch DIP-Schalter ist das Memory-Schaltprinzip
oder
das Taster-Prinzip auch während des
Betriebes umstellbar.
Zum Prinzip Memory-Schalter:
Mit dem Memory-Schalter löst man über einen Proportionalkanal zwei
unterschiedliche Schaltfunktionen mit EIN und AUS aus.
Durch
die Memory-Funktion bleibt ein geschalteter Kanal so lange aktiv
(EIN),
bis der Kanal erneut betätigt wird (dann AUS). |
Zum Prinzip Taster:
Mit dem Tast-Schalter löst man ebenso über einen Proportionalkanal
zwei unterschiedliche Schaltfunktionen mit EIN und AUS aus.
Es
schaltet so lange man sich unter / über dem Schaltpunkt mit dem
Steuerhebel befindet auf EIN.
In der Mittelstellung geht es
dann immer sofort auf AUS, eben wie bei einem Taster / nicht
dauerhaft wie oben .
Zum Hub:
Eine
Schaltfunktion schaltet erst bei 10% oder 20% oder 30% vom
Mittelpunkt entfernt.
Dies erfolgt in zwei Richtungen für 2
Kanäle mit links (ein Kanal) / rechts (anderer Kanal) oder eben
mit hoch/runter...
Der Hub mit 10% 20%
30% ist nur softwaremäßig einstellbar im PIC-Servo-Programm.
Dazu liegen mehrere Varianten zum Brennen des PIC12F683 der
Bastelanleitung im
Download schon eingestellt bei.
Hier wird auch erklärt, wie man es durch selber
ändern der Software, machen kann. (ist leicht, bei etwas
Können...)
Zwei Software-Grundprinzipien liegen dem Download bei, bei
gleichem Schaltungsaufbau :
1.
Das Schalt-Servo
justiert automatisch die Mittelstellung.
Dies erfolgt beim
Einschalten des Schalt-Servos von selbst, so wo gerade der Knüppel
steht.
Man kann den
Mittelpunkt fast auf einen linken/rechten Anschlag legen, wenn man
beim Einschalten den Knüppel so hinstellt.
Ist er zu Nahe am
Anschlag und würde es "fast" nicht mehr schalten, wegen Hub...
(Schaltpunkt liegt über
dem Anschlag hinaus...)
Dann blinkt die
Kontroll-LED als Fehler.
Man muss erneut automatisch Justieren
mit Neu-Einschalten des Empfängers / Servos.
2.
Die Mittelstellung
des Schalt-Servos ist fest im PIC-Programm mit 50% vorgegeben.
Dazu muss im Sender-Menü diese Mittelstellung manuell eingestellt
sein.
Oder :
Hat man keinen Steuerknüppel, sondern einen Schalter,
wo es keine Mittelstellung gibt, dafür ist dies gedacht.
Man
kann bei nur 2 Schalterstellungen den Mittelpunkt nicht
automatisch justieren lassen, wie bei 1. oben .
Vielleicht finden sich auch andere
Anwendungen.
Diese 2-te Software-Variante wollte ich nicht
einfach weglassen.
Beim
automatischen Justieren der Mittelstellung wird erst nach
100
Impulsen der Mittelpunkt justiert.
Grund:
Es wackeln doch
die Rudermaschinen MEIST (nicht immer) beim Einschalten.
Die
ersten Impulse vom Sender stimmen noch nicht exakt.
Der Sender
/ Empfänger
muss erst "einschwingen".
Deshalb werden die ersten 100 Impulse
nicht für das automatische Justieren genommen, erst danach.
(100Impulse * 20msec = 2sec)
Ca. 2sec muss man warten, dann ist
der automatisch justierende Servo-Schalter betriebs-bereit.
Es leuchtet dann die grüne Kontroll-LED.
Der manuelle Servo-Schalter (bei 2.) ist sofort betriebsbereit!
ACHTUNG:
Es wurde 2021 die Software geändert :
"mit Fail Save" (neue
Software) und
"Ohne Fail Save" (alte Software).
Bei "mit Fail Save" werden Fernsteuer-Störimpulse ausgeblendet...
Erst bei 5 aufeinander folgenden gleichen
Schalt-Ereignissen, wie EIN oder AUS schaltet es erst.
Wäre zum Beispiel ein Fehl-Störimpuls unter den 5 Schaltzuständen
schaltet es nicht.
ES SCHALTET ERST WENN 5 MESSUNGEN NACH
EINANDER DIE SELBE AUSWERTUNG BRINGEN.
FEHLIMPULSE WERDEN SO
ZUM BEISPIEL BEIM EIN- UND AUSSCHALTEN DES SENDERS UNTERDRÜCKT.
ABER ES WIRD TRÄGER / LANGSAMER BEIM SCHALTEN.
--> 5*20MSEC =
100MSEC TRÄGHEIT BIS ES ERST SCHALTET .
Die Zahl 5 ist im ASM-Programm
änderbar....
Andauernde Stör-Impulse, wie zum
Beispiel ein 220V Schaltnetzteil, können nicht unterdrückt werden
!
Oder, wie unterhalb beschrieben, bei einem
Elektro-Bürsten-Motor...
--------------------
Die Leiterplatten-Größe hier: 65 x 39mm
Bei der
Versandfirma CONRAD findet man einen ähnlichen schon fertigen Aufbau
(
KLICK HIER ) !
Die Masse sind 43 x
47mm.
Ergänzung
mit dem Download "Servo-Schalter-ERGAENZUNG.zip"
Klaus aus dem Odenwald betreibt mit einer alten 27Mhz (AM)
Fernsteuerung Schiffsmodelle.
Durch den eingesetzten
Elektro-Bürsten-Motor entstanden Störimpulse auf der
Masse-Leitung.
Er hat Abhilfe mit galvanischer Trennung durch
Optokoppler im Servo-Schalter geschaffen.
Im obigen Download
liegen dafür zwei Leiterplattenzeichnungen in "diskreter"-
und als "SMD"-Technik bei,
sowie der neue Stromlaufplan.
Die PIC12F683-Software wurde dabei nicht verändert und stammt aus
dem Grund-Download ganz oben.
Mit seinem
Einverständnis durfte ich es hier veröffentlichen.
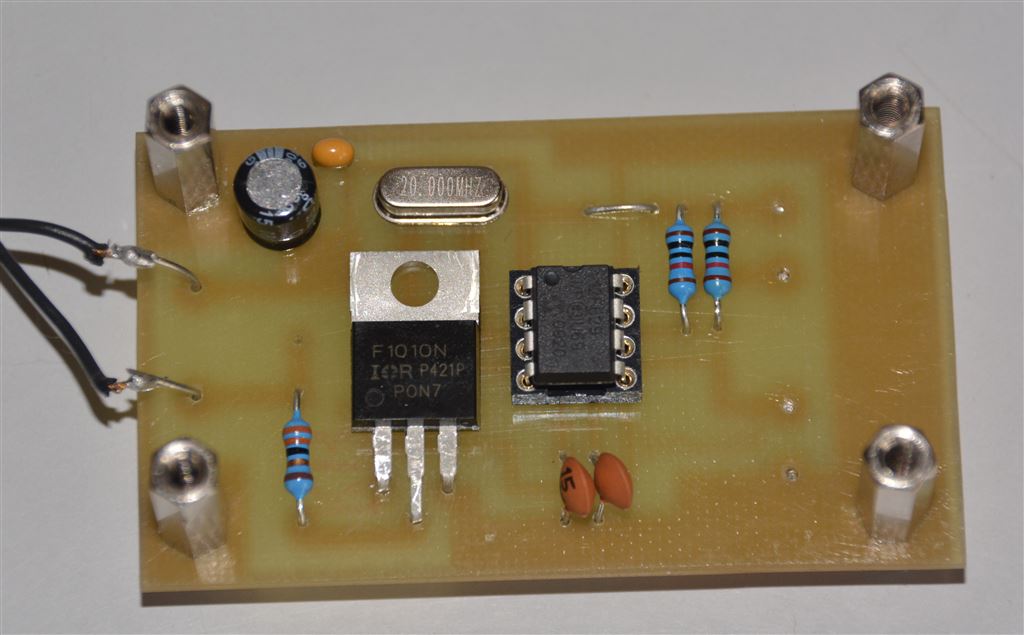
2.
Modellbau-Basteln mit der Bastelanleitung
"Sound-Modul
für obigen 2-Kanal-Servo-Schalter
oder als Einzel-Leiterplatte"
mit dem Controller
PIC12F629
|
 |
Download hier als:
"Soundmodul-fuer-Servo-Schalter.zip"
ca.
13,0Mbyte
Kurzbeschreibung:
Dieses Soundmodul hat nur 2 Melodien / Sounds
im PIC-Controller
software-mäßig integriert.
Es liegen 13
Software-PIC12F629-Varianten
dem Download bei, also 26
Sounds,
welche man brennen kann.
Man kann das Modul
sowohl einzeln, als auch mit
der Servo-Schalter-Leiterplatte
als Huckepack betreiben.
Zu Start / Stopp (Stift/Pin an
GP1 vom PIC12F629)
So lange der Schalter auf
GESCHLOSSEN ist,
spielt es den Sound andauernd und
wiederholend.
Bei OFFEN unterbricht es sofort den
Sound.
Dies geht natürlich auch mit dem Servoschalter.
|
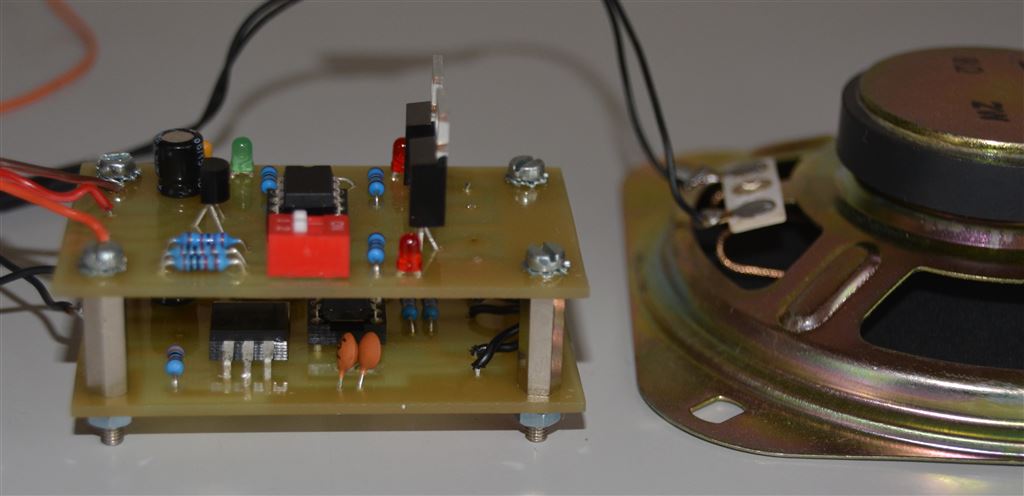 |
Zu Soundauswahl von 2
Sounds (Stift/Pin an GP0 vom PIC12F629)
Bei Schalter GESCHLOSSEN spielt es
den einen Sound.
Bei
Schalter OFFEN spielt es den anderen Sound.
Dies geht
natürlich auch mit dem Servoschalter als
Huckepack.
( siehe links im Foto )
Ändert man also nur die
Soundauswahl mit
GESCHLOSSEN / OFFEN während dem
abspielenden
Sound, spielt es bis der Sound zu Ende ist,
dann kommt der "andere" Sound ....
Zum Stromlaufplan (Klick
hier)
Im Download ist alles besser erkennbar
! |
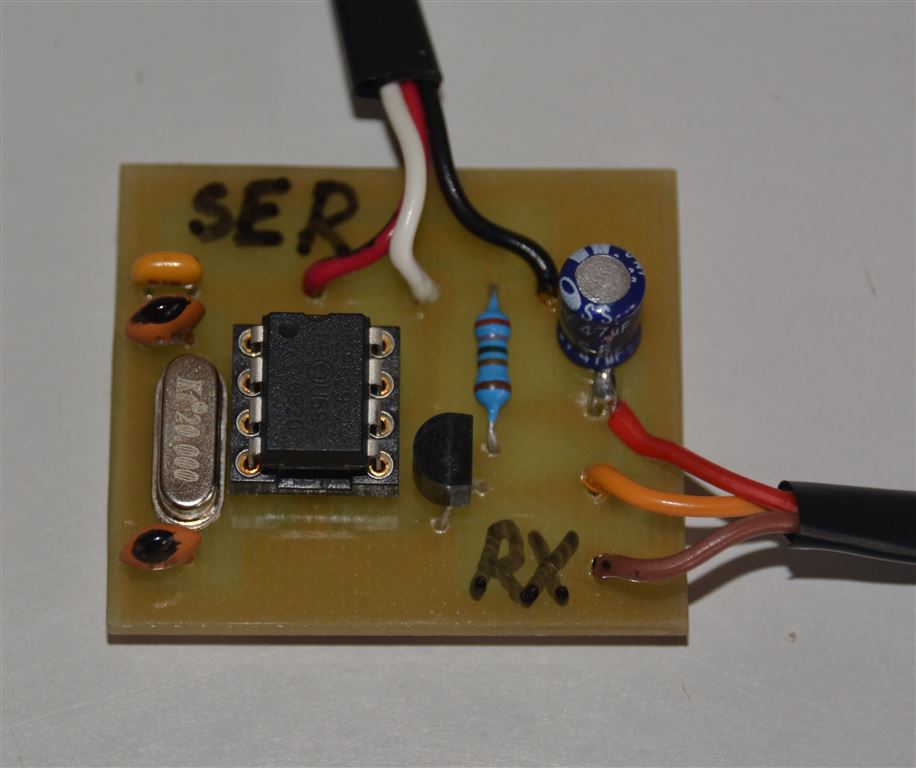
3.
Modellbau-Basteln mit der Bastelanleitung
"Blink-Servo-Einrichtung"
für ein Modell-Auto mit dem Controller PIC12F683
|
 |
Download hier als:
"Blink-Servo-Einrichtung.zip"
ca.
1,2Mbyte
Kurzbeschreibung:
Bei einem Modellbau-Auto sollen bei
rechts und
links-Fahren gleich
die Blinker für recht und links
automatisch zu blinken beginnen.
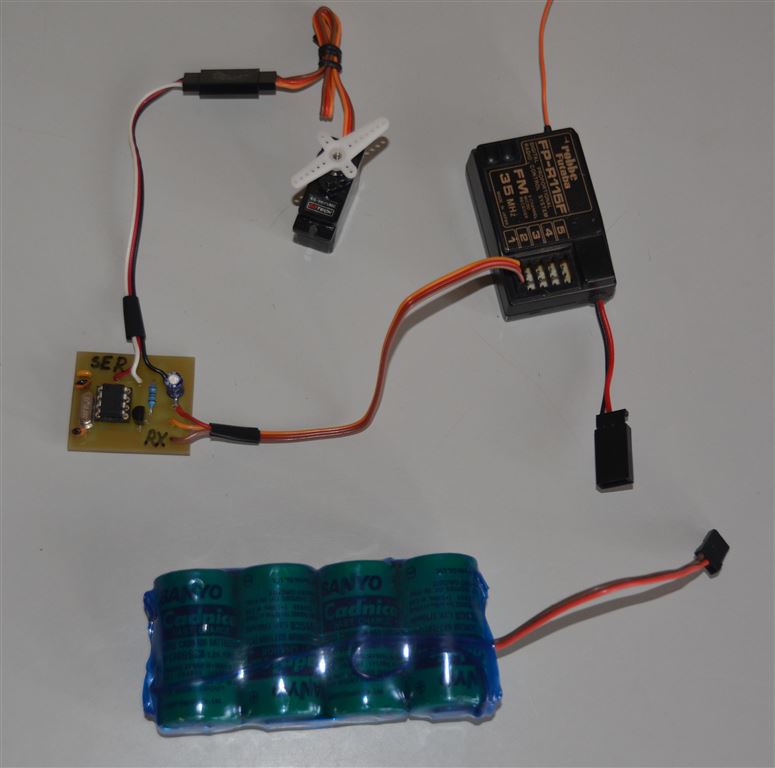
Es wird also
PARALLEL an die Zuleitung
des proportionalen Stell-Servos
der Räder
eine Leiterplatte angeschlossen, welche das
Blinken
übernimmt. Eine Art "V"-Kabel ist notwendig.
Natürlich gibt es dabei einen Haken.
Man blinkt
eigentlich zuerst, bevor man um die Kurve fährt.
Hier erfolgt ABER das automatische Blinken erst,
wenn man die Räder schon eingeschlagen hat.
|
 |
Das Blinken
erfolgt bei entweder 10% 20% 30%... von der
Mittelstellung des Steuerknüppel entfernt.
Man
kann dies Software-Mäßig selbst ändern.
Genauso ist
es mit einer Verzögerung von 0,1sec bis
ca.5sec
oder ohne Verzögerung programmierbar...
bis es erst
blinkt.
Mit einem mechanischen Zusatzschalter
an der Leiterplatte kann man auch Warnblinken
aktivieren.
Dann blinken beide LEDs für rechts und
links gleichzeitig.
Der bei oben "2
Kanal-Servo-Schalter" kann hier
auch
eingesetzt werden.
Vorab :
Der
Stromlaufplan (Klick
hier)
Der
Bestückungsplan (Klick
hier)
Ein
Video hierzu ist auch
empfehlenswert (Klick
hier)
Achtung: Bis das Video startet dauert es etwas.
|
|
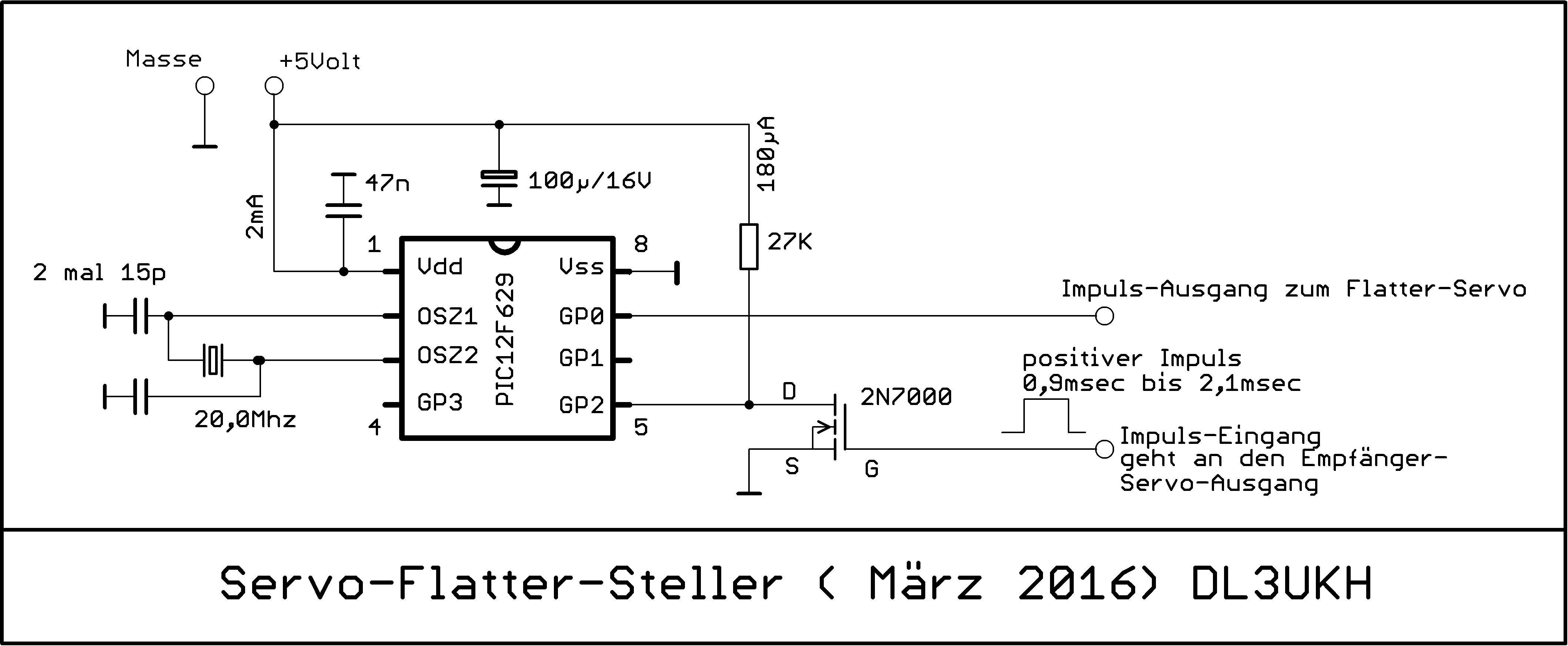
4.
Modellbau-Basteln mit der Bastelanleitung
"Servo-Flügel-Flatter-Stell-Konverter"
mit dem Controller PIC12F629
|
Download
der Bastelanleitung hier als:
"Servo-Flatter-Steller.zip"
ca.
0,7Mbyte
|
Kurzbeschreibung:
Es sollte das Flugmodell Angry Bird
nachgebaut werden.
Dabei bewegen sich die
Flügel-Enden wie ein Vogel ...
 |
Dies wird mit
einer Rudermaschine
bewerkstelligt.
Die Flatter-Geschwindigkeit
ist mit einem
Steuerknüppel einstellbar und
auch der
Ruhezustand der Flügel-Enden.
Eine aufzubauende Leiterplatte
wird zwischen
Empfänger und Rudermaschine
dazwischen geschaltet... |
Die eigentliche
Bastelanleitung usw... ist aus dem Internet
:
(klick
hier)
Elektronische Steuerung der
flatternden Flügel / "nicht Nach-Baubar"
(klick
hier) als Video !!!
mit dem flatternden Vogel-Modell als Video von YouTube
( ansehenswert !!!!! )
(klick
hier)
(siehe bei Indoor....)
oder
die Original Seite von der
Zeitschrift Aviator
(klick
hier)
mit
Modell-Flugzeug-Nachbau-Bastel-Download des Vogel-Modells
|
 |
 |
Mit dem
Nachbau der
elektrischen Flatter-Steuerung
für
die Rudermaschine sind wir nicht zurecht gekommen.
So wurde es
selbst programmiert und aufgebaut
...
Und
deshalb erscheint es hier nochmals
...
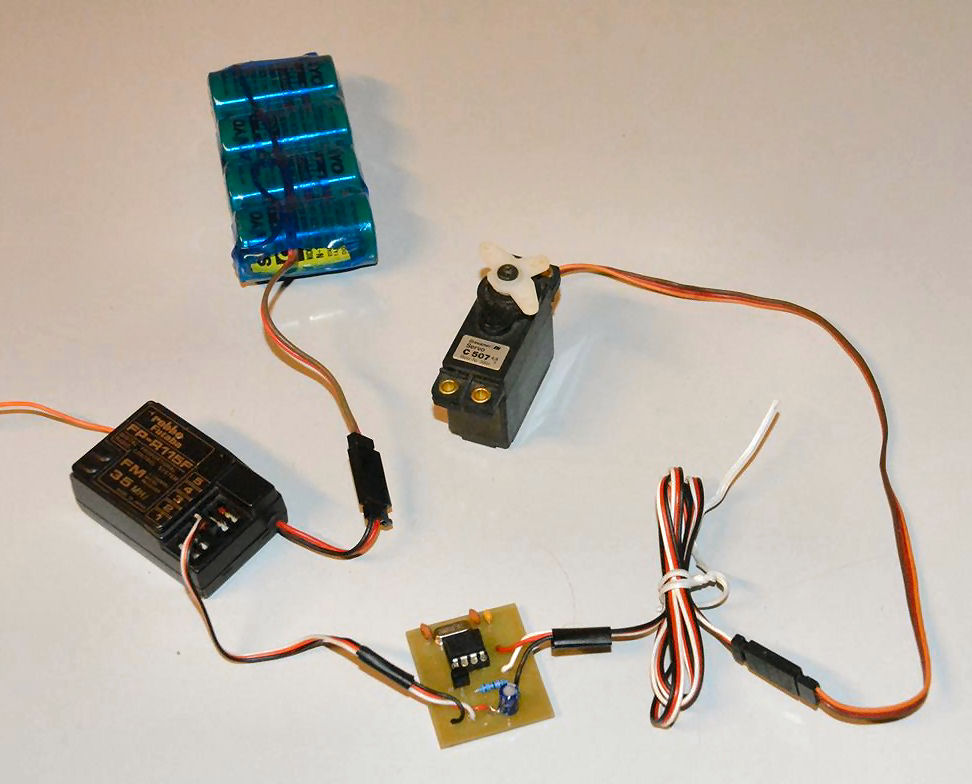
Man schließt diesen Baustein einfach
zwischen
dem Servo und dem Fernsteuerempfänger
an. (siehe links)
Es
flattern die Flügel-Enden mit zunehmender
Geschwindigkeit
mit zunehmendem Steuerknüppel-Ausschlag.
Bei 0° bis Mittelstellung
des Steuerknüppels, gehen
die Flügelenden auf Normal-Stellung
.... Ruhe-Stellung ....
Wenn
man also den "neutralisierenden" Steuerknüppel
loslässt,
bewegen sich die Flügelenden nicht mehr.
Sie sind auf
Ruhe-Stellung (Normal-Stellung).
Viel Besser Erklärt mit meinem Video :
(klick
hier)
Achtung: Bis das Video startet dauert es etwas.
Hier die Einstellmöglichkeiten im ASM-Programm schon mal vorab.
Man könnte ändern, man muss nicht...
(klick
hier)
|
Klick links auf den Stromlaufplan
und er erscheint größer!
|
|
|
|
5.
Modellbau-Basteln mit der Bastelanleitung
"180-Grad-Servo-Stell-Konverter"
mit dem Controller PIC12F629
|
 |
Download hier als:
"180-Grad-Servo-Stell-Konverter.zip"
ca.
900Kbyte
Kurzbeschreibung:
Bei einem normalen Steuerknüppelausschlag der Fernsteuerung
kann man mit diesem Konverter Servos bis 180° stellen.
Die
"eigentlich normalen" Rudermaschinen müssen sich aber auch
im Bereich von 0° bis 180° stellen lassen.
Es gibt auch Servos die
nicht bis 180° gehen...
Dies kann man kontrollieren /
testen mit
der "Servo-Mess-Stell-Einrichtung" (Servo-Tester)
;
hier auf dieser Homepage-Seite unterhalb.
Dieser 180°-Konverter-Aufbau
wird zwischen
dem Empfänger-Servo-Ausgang und
dem
Rudermaschinen-Eingang angeschlossen.
(siehe im Foto
links unterhalb)
Der Aufbau ist
aber nicht so leicht zu bewerkstelligen.
Im
Programm muss man Zahlen,
bei
unterschiedlichen Servos und Fernsteuer-Sendern, ändern
!!!
|
 |
Man muss dazu Messen :
-mit dem Aufbau "Servo-Mess-Stell-Einrichtung"
(Servo-Tester)
und
-mit dem Aufbau "Fernsteuer-Impuls-Messung"
[ hier
unterhalb jeweils als Aufbau...]
Zahlen im ASM-Programm-File
sind dann
am Text-Anfang zu ändern.
(das asm-File ist mit einem txt-Editor
lesbar)
Dann wird das
"180-grad-servo-konverter....ASM"-File
assembliert und es
entsteht ein hex-File.
Mit dem hex-File wird der PIC12F629
gebrannt / programmiert.
Es steht eigentlich alles im
Software-Ordner im Download drin...
Grob zum Prinzip:
Es wird der Hub beim Empfänger mit einer Auflösung
von
5µsec gemessen und
mit doppeltem Hub (Auflösung hier
10µsec)
an den Servo-Ausgang ausgegeben.
Wenn also ein
Impuls empfangen wird, kommt er "konvertiert"
am
Ausgang kurz danach raus.
Die Pausenzeiten könnten so
beliebig sein.
(Klick
hier)
und es erscheint der Stromlaufplan
(Klick
hier)
und man sieht ein erklärendes Video
Achtung: Bis das Video startet dauert es etwas. |
Achtung :
Es hat bei Nachbastlern auch
schon sofort funktioniert !
Ohne das man durch Messen mit zwei
Messaufbauten
die Zahlen im asm-File ändern musste !!!
GANZ WICHTIG :
Ich übernehme keine Haftung, wenn man über die
Rudermaschinen-Anschläge "fährt" und
das Servo kaputt macht
!!!! (Sowie den Empfänger...)
|
Meine Wertung:
Erst wo alles fertig aufgebaut war, hatte ich mich informiert,
ob es so etwas schon gibt. Also wie es die Experten machen...
Mit einer schon älteren 35Mhz Fernsteuerung hat mein Bruder
(Modellflieger) mir vorgeführt,
dass man einen fast 180°
Ausschlag der normalen Servos mit dem Sender einstellen
kann.
(also ohne Konverter-Schaltung)
Genauer gesagt waren
es so ca. 160° bis 170°...
Den
Rest zu 180° macht das Steuergestänge... (meine Meinung)
Man braucht diesen Aufbau eigentlich nicht
!!!!!!!!!!!!!!!!! |
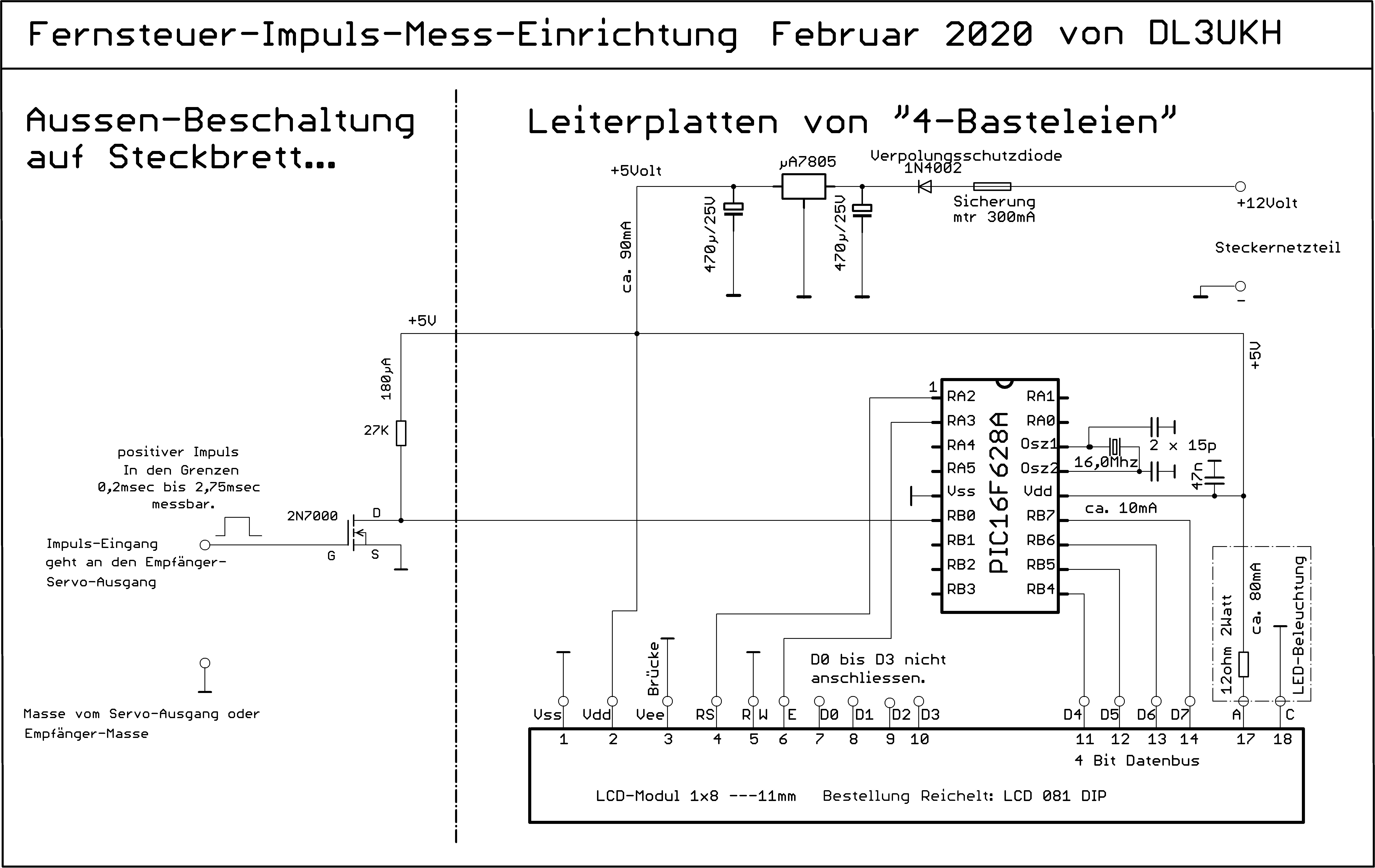
6.
Modellbau-Basteln mit der Bastelanleitung
"Fernsteuersender bzw.
Empfänger Stell-Impuls-Messung"
mit dem Controller PIC16F628A
|
|
Download hier als:
"Fernsteuer-Impuls-Messung.zip"
ca.
1.200Kbyte
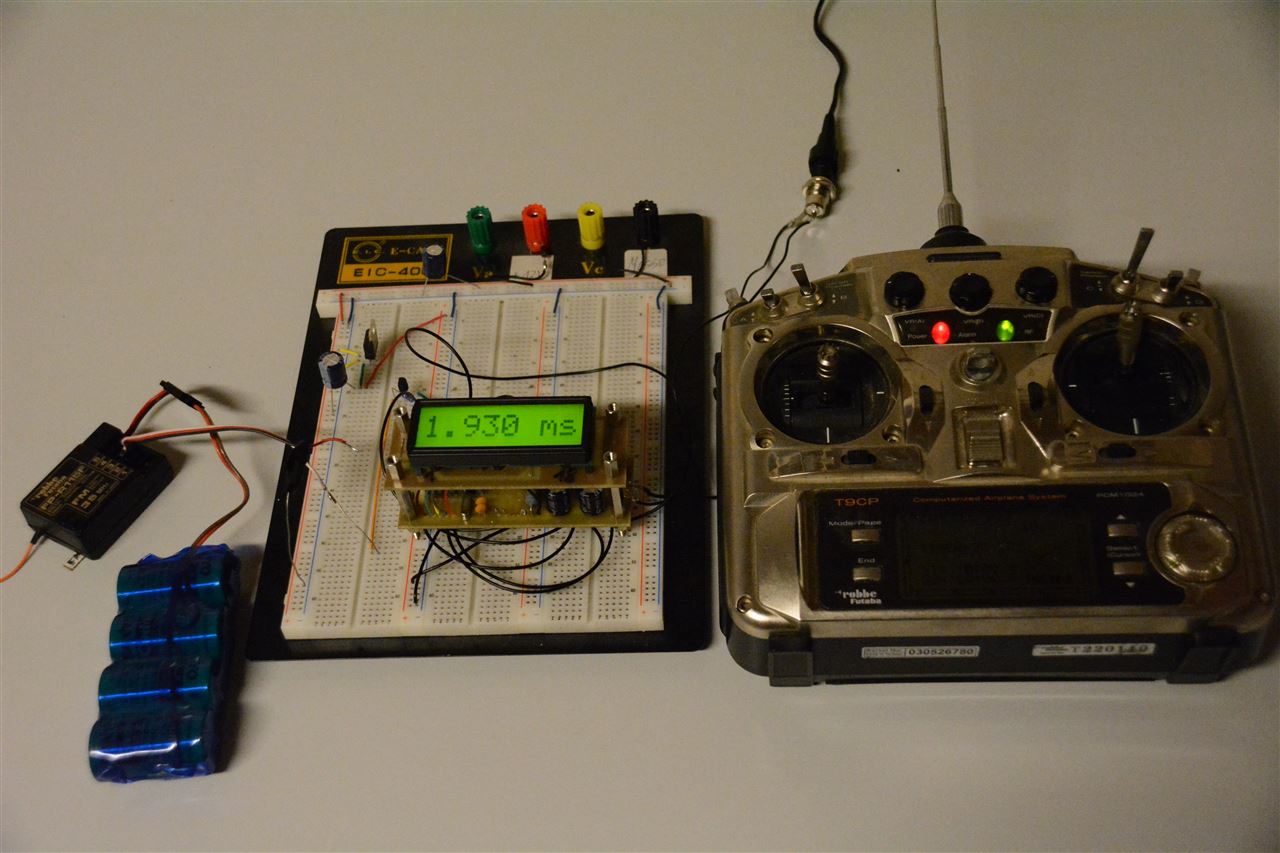
Kurzbeschreibung:
Man
kann die Impulse messen, welche aus dem Servo-Ausgang
vom
Empfänger kommen.
Und direkt sehen (durch bewegen des
Steuer-Knüppels), wie
groß die Impulse sind und sich
verändern...
Man sieht es auf dem Display.
Die Grenzen
sind 0,200msec bis 2,750msec.
Bei größer kommt eine
Fehler-Ausschrift : ERROR
Diese Fehler-Ausschrift erscheint
kurzzeitig,
wenn man zum Beispiel den Sender ein und
aus-schaltet...
Es
wird mit einer Auflösung von 10µsec gemessen und angezeigt. |
Klick
auf das Foto oder den Stromlauplan und es wird größer |
(Klick
hier)
und man sieht ein erklärendes Video
Achtung: Bis das Video startet dauert es etwas.
|
Der NORMALE
Impuls-Bereich einer Fernsteuerung ist 0,9msec bis 2,1msec.
Da jeder Impuls gemessen und
angezeigt wird, ist die Darstellzeit auf dem Display
20msec(Pause) + ca. 2msec(Impuls) = ca. 22msec
Im ASM-Programm
kann man die gemessene Zeit nur jeden bis jeden ca. 20-zigsten
Impuls anzeigbar machen...
Man muss dann eine Zahl in der
asm-Software ändern...
Jetzt
(hier im Download) wird jeder Impuls anzeigt.
Es kann dabei die Anzeige
flimmern, da aller 22msec gemessen und
angezeigt wird...
Befindet man sich mit dem Sender im Nahbereich "ruckeln" /
"zittern"
doch fast immer die Rudermaschinen etwas.
Dies
kann man auch hier exakt sehen mit dem Hin- und Her-"Kippeln"
der gemessenen Impulszeiten.
Die Rudermaschine könnte
beim Messen auch angeschlossen sein.
Natürlich hätte man zum Messen auch einen Oszillographen
nehmen können !!!!!
Ich konnte
beide Mess-Methoden nicht vergleichen,
da ich keinen modernen Oszi habe !
Ich habe
die Leiterplatten aus der Bastelei "4 Basteleien mit einem
Aufbau" genutzt.
Und die restlichen / zusätzlichen
Bauelemente auf einem Steckbrett untergebracht.
Die
Homepage-Seite "4 Basteleien mit einem Aufbau" findet man oben
links...
GANZ WICHTIG
:
Ich übernehme keine Haftung, wenn
man
den Fernsteuer-Empfänger dabei kaputt macht !!!!
|
Achtung:
Es ist möglich beide Aufbauten mit
6.
"Fernsteuer-Impuls-Messung"
7.
"Servo-Mess-Stell-Einrichtung"
mit nur EINEM
"4-Bastelei"-Aufbau zu realisieren.
Man braucht
dabei nicht
die Zusatzbeschaltung jeweils unterschiedlich anschließen.
Man kann diese bei jedem Aufbau immer dran lassen...
Es ist dann nur
der PIC16F628A und PIC16F88
dem entsprechend nach Anwendung
auszutauschen.
Eine Präzisions-IC-Sockel-Fassung muss
natürlich eingesetzt sein !!!
|
|
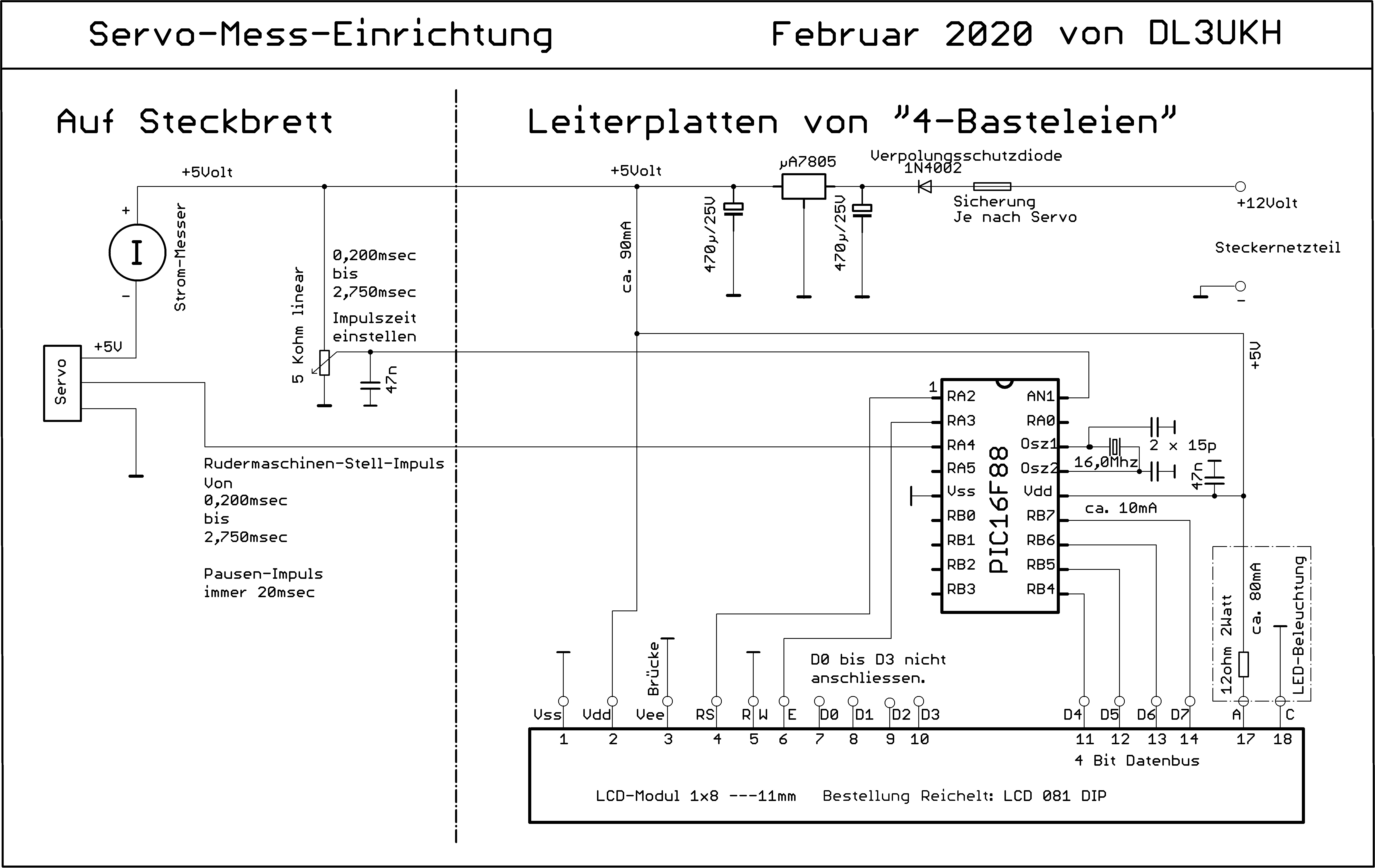
7.
Modellbau-Basteln mit der Bastelanleitung
"Servo-Mess-Stell-Einrichtung"
(eine Art Servo-Tester)
mit dem Controller PIC16F88
|
 |
Download hier als:
"Servo-Mess-Stell-Einrichtung.zip"
ca.
1.300Kbyte
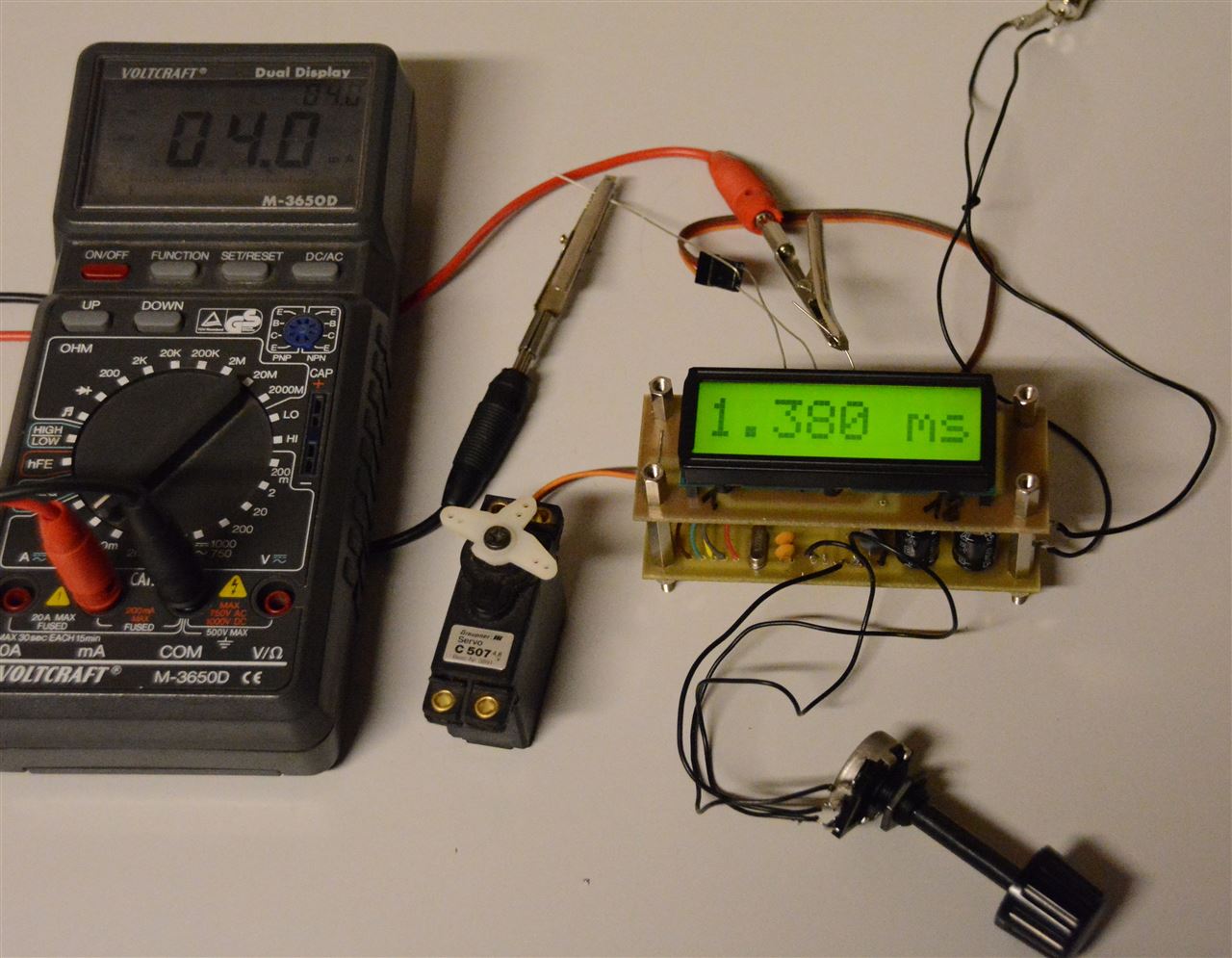
Kurzbeschreibung:
Man
kann Impulse an den Servo ausgeben, welche mit
einem Poti
einstellbar sind.
Impuls-Bereich von 0,200msec bis
2,750msec.
Es wird
dabei der tatsächliche Impuls auf einem Display angezeigt.
Die Rudermaschine dreht dabei...
Man kann also
ausprobieren, ob das Servo auch 180° dreht...
und mit
welcher Impulslänge...
Ob er klemmt / kratzt / wie schnell
er dreht (beim Poti durchdrehen) usw...
Es
ist hiermit eine Art Servo-Test-Einrichtung
realisiert...
Der NORMALE Impuls-Bereich einer
Fernsteuerung ist 0,9msec bis 2,1msec.
Beim 180° Servo sind die
Anschläge ca. 0,650msec und ca. 2,35msec !
|
|
Klick auf das Foto oder den
Stromlauplan und es wird größer |
(Klick
hier)
und man sieht ein erklärendes Video
Achtung: Bis das Video startet dauert es etwas.
|
Bei dieser
Messeinrichtung könnte man an den Anschlag des Servos fahren.
Dabei steigt der Strom der Rudermaschine.
Man kann dies mit
einem Strom-Messer kontrollieren.
Manchmal "ruckeln" die
Rudermaschinen dabei auch,
wenn man an den Anschlag
"fährt".
[ Vorsicht : Rudermaschine kann
kaputt gehen ! ]
Eine Strommess-Kontrolle ist auf jeden
Fall sinnvoll.
Es
wird mit einer Auflösung von 10µsec gestellt und angezeigt.
Die
Impuls-Pausenzeit ist wie üblich 20msec.
Ich habe
die Leiterplatten aus der Bastelei "4 Basteleien mit einem
Aufbau" genutzt.
Und die restlichen / zusätzlichen
Bauelemente auf einem Steckbrett untergebracht.
Die
Homepage-Seite "4 Basteleien mit einem Aufbau" findet man oben
links...
(Klick
hier) und man sieht einen Servo-Tester,
welchen es zu kaufen gibt.
Er funktioniert aber nur im
Stell-Bereich von 0,8msec bis 2,2msec.
Dieser Bastel-Aufbau hier
hat
einen größeren Impuls-Stellbereich von 0,2msec bis
2,750msec.
Hiermit kann man auf jeden Fall bis an die
180° Anschläge (rechts + links) fahren.
Beim gekauften Tester
ist dies nicht der Fall.
Zu den Kosten von meinem
Aufbau :
Die LCD-Anzeige (1x8Zeichen) bei mir kostet schon
17.-€ + ca. 10.-€ (Rest) = ca. 30.-€
Der fertig gekaufte Tester ist
auf jeden Fall billiger !
|
GANZ WICHTIG :
Ich übernehme keine Haftung, wenn man
die
Rudermaschine dabei kaputt macht !!!
Achtung:
Es ist möglich beide Aufbauten mit
6.
"Fernsteuer-Impuls-Messung"
7.
"Servo-Mess-Stell-Einrichtung"
mit nur EINEM
"4-Bastelei"-Aufbau zu realisieren.
Man braucht
dabei nicht
die Zusatzbeschaltung jeweils unterschiedlich anschließen.
Man kann diese bei jedem Aufbau immer dran lassen...
Es ist dann nur
der PIC16F628A und PIC16F88 dem entsprechend nach Anwendung
auszutauschen.
Eine Präzisions-IC-Sockel-Fassung muss
natürlich
eingesetzt sein !!!
|
|
|















